世界初、ドローン同士の直接通信で自動追従群飛行と自律接近回避に成功
〜多数のドローンが飛び交う時代における運用の効率化と空の安全性の向上へ〜
2022年4月11日
ポイント
-
ドローン同士が直接通信して互いの位置を知らせることで、自律して飛行することが可能なシステムを開発
-
4機のドローンによる、自動追従群飛行と自律接近回避の実証に世界で初めて成功
-
多数のドローンが飛び交う時代における運用の効率化と空の安全性の向上に貢献
国立研究開発法人情報通信研究機構(NICT、理事長: 徳田 英幸)は、ドローン同士がそれぞれの位置情報などを地上の操縦者やネットワークを経由せずに直接通信するシステムを開発しました。
このシステムを応用して、先導するドローンに3機のドローンが一定の間隔を保って追従し、編隊飛行させる群飛行技術、及び同一の空域に4機のドローンが飛行しても自律的に相互の接近を回避するシステムの実証実験に世界で初めて成功しました。
本技術により、特に目視外まで飛行させる場合にドローン運用の効率化や電波の有効利用、及び空の安全・安心につながり、複数のドローンの同時飛行による物流や広範囲の農薬散布、災害対策など様々な分野への応用が期待されます。
※今回の成果の一部は、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO、理事長: 石塚 博昭)が進める「ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト」の中の「遠隔からの機体識別および有人航空機との空域共有に関する研究開発」において実施しました。
背景
近年、農業・測量・警備・物流・災害調査・点検など幅広い分野でドローンを活用する動きが活発化しており、たくさんのドローンが空を飛び交う時代がすぐそこまで来ています。国の規制緩和も進んでおり、今年度中には、「小型無人機に係る環境整備に向けた官民協議会」が毎年取りまとめている「空の産業革命に向けたロードマップ」におけるレベル4と言われる有人地帯上空での目視外飛行も可能になります。
今回の成果
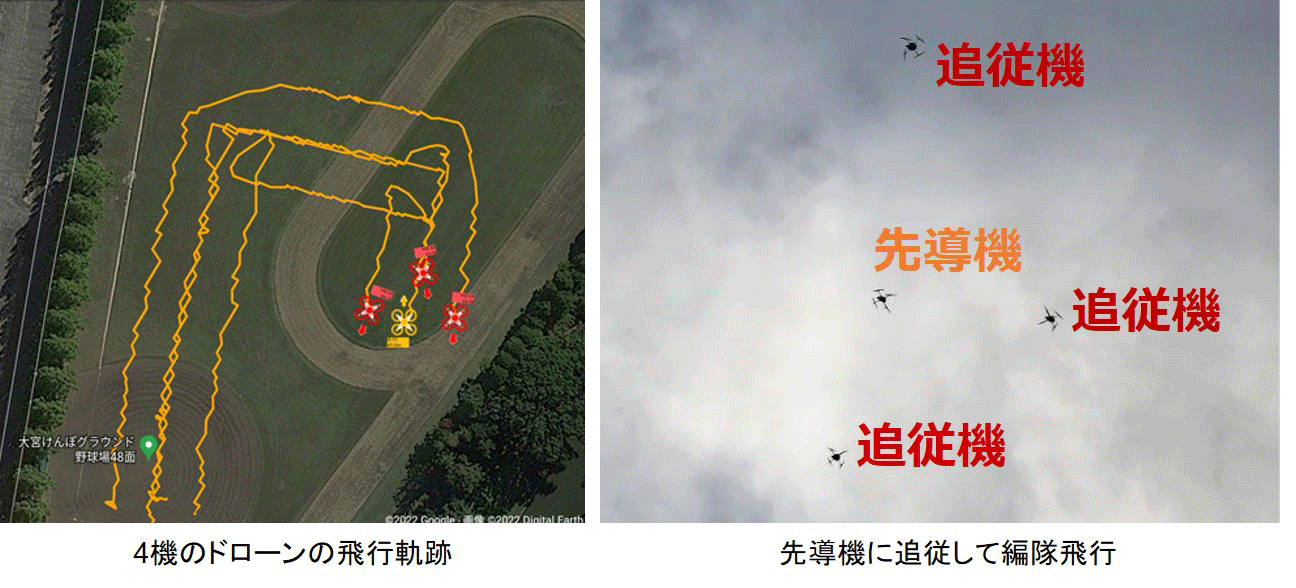
図1. 4機のドローンが連携した自動追従群飛行実験
[画像クリックで拡大表示]
[画像クリックで拡大表示]
本研究開発では、ドローン同士が特定小電力無線局である920 MHz帯の電波(出力20mW、上空利用可能、無線局免許不要)を使って相互にブロードキャスト通信を行いGNSSで得られた位置情報を共有する「機体間通信システム」を開発しました。これを各ドローン上で飛行制御装置に接続することにより、ドローン同士が相互に連携することを可能にしました。
このシステムに、「先導するドローンに対して他のドローンが自動で追従する群飛行(離着陸を含む。)」や「自律的な接近回避」のための飛行制御アルゴリズムを組み込むことで、それぞれ4機での群飛行及び接近回避の飛行試験に世界で初めて成功しました(図1、2参照)。図1左のオレンジ色の線は各ドローンの飛行軌跡を示しており、黄色の先導機に追従して赤色の3機のドローンが編隊を維持しながら飛行できています。また、図2左に示すように、4機が方向を変えて接近を回避した後、図2右に示すように、予定していた経路にそれぞれ復帰することを確認しました。
なお、本システムは、ドローン間だけでなく、ドローンと有人ヘリコプターの間でも利用でき、数kmの距離を隔ててヘリコプターが接近した場合に、ドローンが自律的な接近回避をすることが可能になることも実証しています。
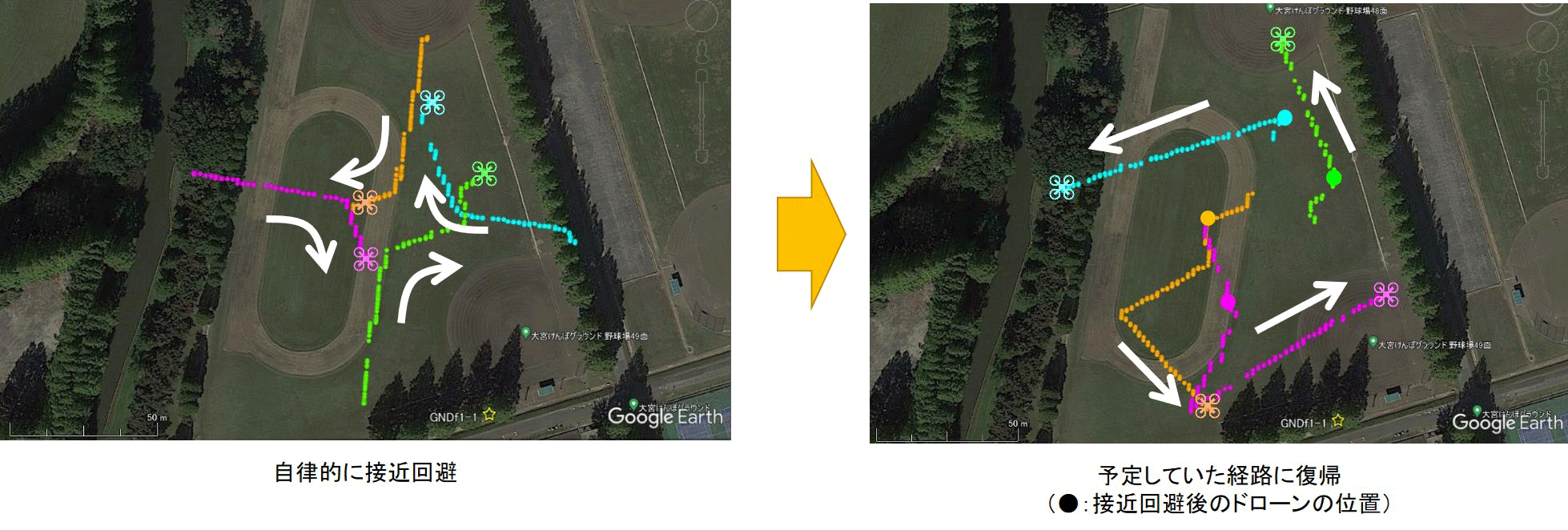
図2. 4機のドローンによる自律接近回避実験での飛行軌跡
[画像クリックで拡大表示]
[画像クリックで拡大表示]
今後の展望
これらの技術によって、今後混雑が予想される上空での効率的で安全・安心なドローンの活用が可能となり、物流、農業、点検、防災といった様々なシーンでの利用が期待されます。
また、今回の成果を基に、更に多くのドローンが同一の空域内を飛行する場合に対応した通信制御方式や飛行制御方式についての検討や、飛行する環境に応じた編隊の隊形にするなどの群飛行技術や通信技術の高度化を進め、本方式の実用化を目指していく予定です。
関連する過去のプレスリリース
この成果の一部は、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の委託業務の結果得られたものです。
補足資料
今回開発したドローンの群飛行及び接近回避システム
従来、ドローンは1機のドローンに対して1人が操縦していましたが、運用の効率化のため、複数のドローンを1人で操縦できるようにするニーズが高まっています。複数のドローンを1人で操縦することは、技術的にはこれまでも可能であったものの、ドローンごとに地上側との無線通信が必要なため、電波が混雑するという問題がありました。特に、操縦のために使用する2.4 GHz帯は一般的に多く利用されており、他の周波数(ここでは920 MHz)を利用することで通信の混雑を避けられる可能性が広がります。また、GNSSで得られる位置情報に基づき、あらかじめ決められた飛行プログラムで自律飛行させて多数のドローンを運用するシステムも実用化されていますが、飛行の途中で飛行計画を変更したり、地上の操縦者を経由せずにドローン同士で追従や連携させて飛行したりすることまでは実現できていませんでした。また、目視外飛行では、操縦者がドローンの機影を直接目視確認できないため、多数のドローンが同一の空域を飛び交うようになると、衝突などのリスクが増大すると考えられます。これまでの超音波センサやカメラ、レーダに基づく回避技術に加えて、ドローン同士が直接通信することによって、周囲のドローンの位置をドローン自身が把握し、地上の操縦者を経由せずに衝突の危機を回避することができれば、運用者が異なる多くのドローンが混在する同一の空域をより安全に利用することができます。
今回開発した群飛行の飛行制御では、各ドローンは、NICTが開発した機体間通信システム(図3参照)により1秒に1回以上の頻度で自機の位置情報を周囲にブロードキャストし、それぞれがこれを受信することで周囲のドローンとの相対位置を把握し、安全な飛行間隔を保ちつつ離陸・飛行・着陸を行うことが可能となっています。今回の実験では1機の先導するドローンに対して、3機の追従ドローンが編隊の形を保って飛行することができました(図4左参照)。
また、今回開発した接近回避の飛行制御では、他のドローンが一定の距離まで接近してきた場合に、その場で停止するか、安全な方向に自動的に進路を変更し、十分な距離まで離れた後に元の飛行ルート上に戻ることで、お互いが自律的に危機回避することができます(図4右参照)。これまでは3機までのドローンの間での接近回避までは実証されていますが、今回の実験では、ドローン同士の自律接近回避に初めて4機で成功しました。東西南北の方向から同一の地点に向かって直進飛行してきた場合に、相互に約20 mの距離まで近づいたところで、操縦者が操作することなく、それぞれが自律的に飛行経路を変えて危険な接近を回避できていることを確認しました。
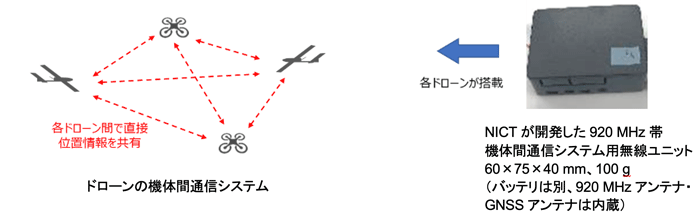
図3. 地上の操縦者を経由しない機体間通信システム
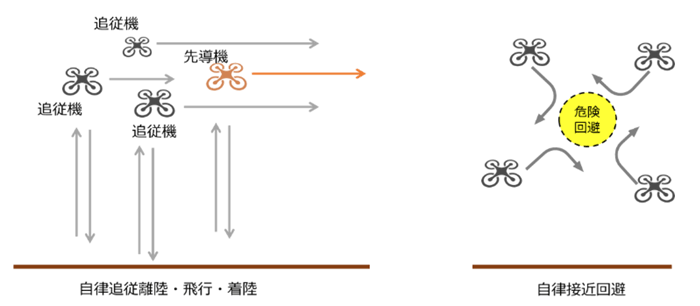
図4. 機体間通信によって可能となる群飛行及び接近回避のイメージ
用語解説
ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト
NEDOが推進するプロジェクト。小口輸送の増加や積載率の低下などエネルギー使用の効率化が求められる物流分野や、効果的かつ効率的な点検を通じた長寿命化による資源のリデュースが喫緊の課題となるインフラ点検分野において、無人航空機やロボットの活用による省エネルギー化の実現が期待されている。このため、このプロジェクトでは、物流、インフラ点検、災害対応等の分野で活用できる無人航空機及びロボットの開発を促進するとともに、社会実装するためのシステム構築及び飛行試験等を実施している。
このプロジェクトのうち、「無人航空機の運航管理システム及び衝突回避技術の開発」の「無人航空機の運航管理システムの開発」において、リモートIDや機体間通信に関する取組を行っている。
http://nedo-dress.jp/
http://nedo-dress.jp/
小型無人機に係る環境整備に向けた官民協議会
平成27年11月5日に政府が開催した「第2回未来投資に向けた官民対話」において、安倍元内閣総理大臣より小型無人機の利用者と関係府省庁等が制度の具体的な在り方を協議する「官民協議会」の立上げについての指示があり、これを受け、小型無人機の安全確保に向けた制度設計の方向性、利用促進、技術開発等の諸課題について、利用者と関係省庁が一体となって協議するために平成27年12月7日に発足した会議。内閣官房が事務局を務める。
https://www.kantei.go.jp/jp/singi/kogatamujinki/index.html
https://www.kantei.go.jp/jp/singi/kogatamujinki/index.html
特定小電力無線局
比較的狭い範囲内をサービスエリアとする無線通信に対する需要の高まりに応じて制度化された無線局の一つ。無線局の要件の一つに、「総務大臣が別に告示する用途、電波の形式及び周波数並びに空中線電力に適合するもの」が規定されている。本システムで利用する920 MHz帯無線機器はこれに該当し、無線局免許を取得する必要はない。なお、本システムでは、通信速度を低く抑える代わりに遠方まで到達するLPWA(Low Power Wide Area)と呼ばれる通信方式を採用しており、小電力ながら条件がよければ10 km以上の距離を隔ててデータを伝送することが可能。
https://www.tele.soumu.go.jp/j/adm/system/ml/small/index.htm
ブロードキャスト通信
無線LANなどの一般的なデータ通信は、通信相手先を指定して1対1で双方向に通信するのに対して、ブロードキャスト通信は一つの端末から不特定多数の端末に対して同じデータを同時、かつ一方向で送信する通信方法。今回開発した機体間通信システムは、互いに信号がぶつからないよう、複数の端末それぞれがタイミングを区切ってブロードキャスト通信することにより、端末間で共通の周波数を使って各位置情報を相互に共有することを可能としている。
GNSS
衛星測位システムのことで、人工衛星から発射される信号を用いて位置測定・航法・時刻配信を行うシステムのこと。GPSや準天頂衛星システムなどが挙げられる。業務用のドローンには、必ずこの受信機が搭載されており、自機の位置を常に把握しながら、あらかじめ決められた飛行ルートに沿って自律的に飛行することができる。
本件に関する問合せ先
ネットワーク研究所
ワイヤレスネットワーク研究センター
ワイヤレスシステム研究室
松田 隆志
E-mail: matsuda nict.go.jp
nict.go.jp
nict.go.jp広報(取材受付)
広報部 報道室
E-mail: publicitynict.go.jp
nict.go.jp