物をつかむ際の“触覚情報と視覚情報が統合される脳内メカニズム”を特定
ポイント
-
手で物をつかむ際に“指を動かして感じる触覚情報”と“指の動きの視覚情報”が脳内で統合されるメカニズムを世界で初めて特定
-
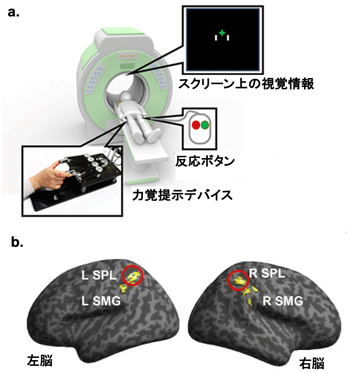
高磁場のfMRI装置に持ち込める力覚提示デバイスを独自開発することで、触覚と視覚の情報統合に関わる脳内ネットワークの一端を解明
-
脳機能の知見を活用した効果的・効率的なマルチモーダル情報のXR技術・AI技術の実現に期待
背景
今回の成果
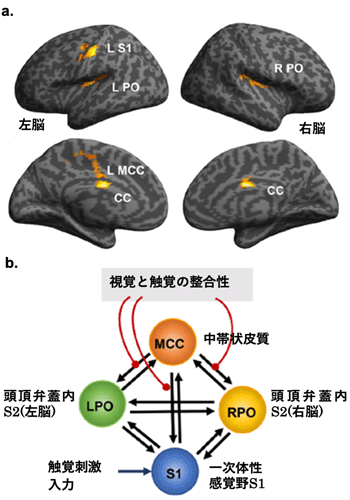
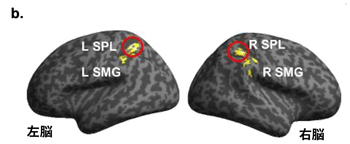
b. 視覚情報と触覚情報の統合に関連した脳部位
今後の展望
論文情報
補足資料
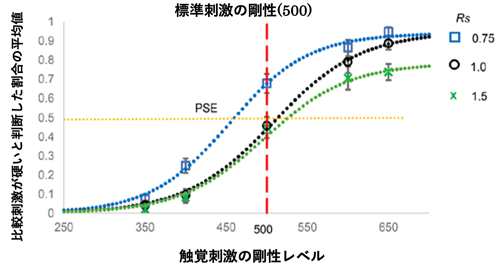
行動実験
fMRI実験
用語解説
能動的な触知覚(active touch) 触知覚は、外部の物が自分の身体に当たって感じる「受動的な触知覚(パッシブタッチ)」と自ら物に働きかけてその物理的特性を感じ取る「能動的な触知覚(アクティブタッチ)」に分けられる。後者の例としては、手で物をつまんだり握ったりしてその硬さ・柔らかさ(stiffness: 剛性)を感じたり、手で物の表面をなぞってざらつきを感じたりすることが挙げられる。 元の記事へ
触覚(haptics) 生理学的には、身体の表層・深部組織で知覚される感覚は体性感覚と呼ばれ、皮膚感覚・自己固有感覚等を含むが、これらを総称して触覚(ハプティクス)と呼ばれることも多く、本論文ではその表現法に従っている。 元の記事へ
機能的磁気共鳴撮像法(fMRI: functional Magnetic Resonance Imaging) 核磁気共鳴の原理を利用して、脳の神経活動に付随して生じる局所的な血流変化を計測し、画像化する手法。 元の記事へ
高磁場に影響されない力覚提示デバイス(force-feedback device) fMRI装置の3T(テスラ)の高磁場内に金属等の磁性体を持ち込むことは安全性の観点から許されていない。力覚提示デバイスは、人の動作に合わせて力を発生させて人に硬さ・柔らかさ等の感触を感じさせる装置であるが、通常、磁性体のモーターや筐体から構成されるため、そのままではfMRI実験に利用することはできない。そこで今回、超音波モーター、光学センサ、アルミ・チタン・樹脂等の非磁性体の素材を用いた力覚提示デバイスを独自に開発し、触知覚に関するfMRI実験に用いた。 元の記事へ
異種感覚情報 人の目・耳・皮膚など、異なる感覚器官で捉えられた情報は異種感覚情報と呼ばれている。異なる感覚器官からの情報が脳内のどこでどのように統合されているのかの解明は、脳科学の主要テーマの一つと考えられている。 元の記事へ
マルチモーダル情報 複数の異なる情報源(モダリティ)からの情報は「マルチモーダル情報」と呼ばれており、それらを活用する技術の研究開発が進められている。特に、言語(テキスト)情報だけでなく、映像、音声、感触、香りなどの五感情報や各種センサ情報を複合的に処理するAI技術やこれらの情報を統合・制御してユーザに適切に提示するためのインタフェース技術などの実現が期待されている。 元の記事へ
XR(extended reality)技術 仮想空間やデジタルツイン空間(実世界をデジタル化した空間)を構築・活用する技術を総称してXR技術と呼ぶ。仮想空間を3Dで提示したり、実空間と重畳させて表示するためのデバイス技術(VR/AR/MRヘッドセット等)、人の動作等をセンシングする技術、多感覚情報(映像・音響・感触等)を生成・提示する技術等も含まれる。 元の記事へ
行為の主体感(sense of agency) 人が行為(物の操作等)を起こしたときにその行為を起こした主体が自分であると感じる感覚。今回のfMRI実験の視覚と触覚の整合条件(指の動きと指を示す視覚情報の動きが一致する条件)では、行為の主体感が高まると考えられる。 元の記事へ
動的因果モデリング(DCM: dynamic causal modeling) 複数の脳領域間で方向性を持った因果的結合をモデル化し、その仮説検証を行う統計的な分析手法。 元の記事へ
本件に関する問合せ先
ユニバーサルコミュニケーション研究所
先進的リアリティ技術総合研究室
Juan Liu、安藤 広志
 khn.nict.go.jp
khn.nict.go.jp広報(取材受付)
広報部 報道室
nict.go.jp