60 GHz帯大容量無線で、飛翔中ドローン間の“すれ違い通信”に成功
~ドローン群の協調飛行で作り上げる上空無線ネットワークの実現に期待~
2023年5月24日
ポイント
-
飛翔中のドローンがすれ違う0.5秒の間に、60 GHz帯大容量無線を用いて120 MBのデータ伝送に成功
-
追従飛行によるリンク維持時間の延長で、より大容量なデータ伝送も可能となることを確認
-
ドローン群の協調飛行で作り上げる上空無線ネットワークの基盤技術としての活用に期待
国立研究開発法人情報通信研究機構(NICT、理事長: 徳田 英幸)は、ソニーセミコンダクタソリューションズ株式会社(代表取締役社長 兼 CEO: 清水 照士)と共同で、飛翔中ドローン間の60 GHz帯無線を用いたデータ伝送実験を試み、2機のドローンを用いたすれ違い飛行に伴う0.5秒程度の通信スポット通過時間で120 MBのデータ伝送に成功しました。また、先行する1機が作る通信スポットを追うように2機目の飛行ルートを設定し、等間隔で飛行させる追従飛行を行うことで、60 GHz帯でのリンク維持時間を延長でき、より大容量なデータ伝送も可能となることを確認しました。
これらの成果は、ドローン群の協調飛行(すれ違い飛行や追従飛行)で作り上げる上空無線ネットワークの基盤技術としての活用に期待できるほか、滞空飛行ができない観測用途の無人航空機からの飛行中におけるデータ回収用途としての活用が期待されます。
背景
Beyond 5Gによって達成すべき目標概念の一つに「超カバレッジ拡張」があります。その実現には、従来の陸上移動通信ネットワークの構築だけでなく、空・海・宇宙空間までを通信サービスエリアとするための非地上系ネットワーク(NTN)の構築が鍵となりますが、上空ネットワークについては、農業分野や点検、物流といった幅広い分野で既に活躍し始めているドローンの活用が有効です。
超高周波帯通信デバイスを用いたデータ中継機能をドローンに搭載すれば、リアルタイム中継ネットワークを上空に構築できるほか、大容量ファイルの転送用途などであれば、ドローンが受信したデータを一次保存したまま宛先となる遠隔地まで飛行搬送した上で無線転送する、遅延耐性ネットワーク(DTN)原理に基づいた中継ネットワークの構築も可能になります。このような方法で、より低コストでカバレッジ性の高い上空無線ネットワークの構築が可能になると考えられます(補足資料1参照)。
ただし、超高周波帯を用いたドローン間通信は、従来のマイクロ波帯と比較して伝搬損失が極めて大きく、直進性が強いため、通信スポットが空間的に限定される特徴があります。特に、移動しながらの通信では、さらに、通信が可能な時間も限定される難しさがあり、これまで、飛翔するドローン間の超高周波データ伝送の実用性は明らかになっていませんでした。
今回の成果

図1 60 GHz帯データ伝送中のドローン及び
形成される通信スポットの模式図
形成される通信スポットの模式図
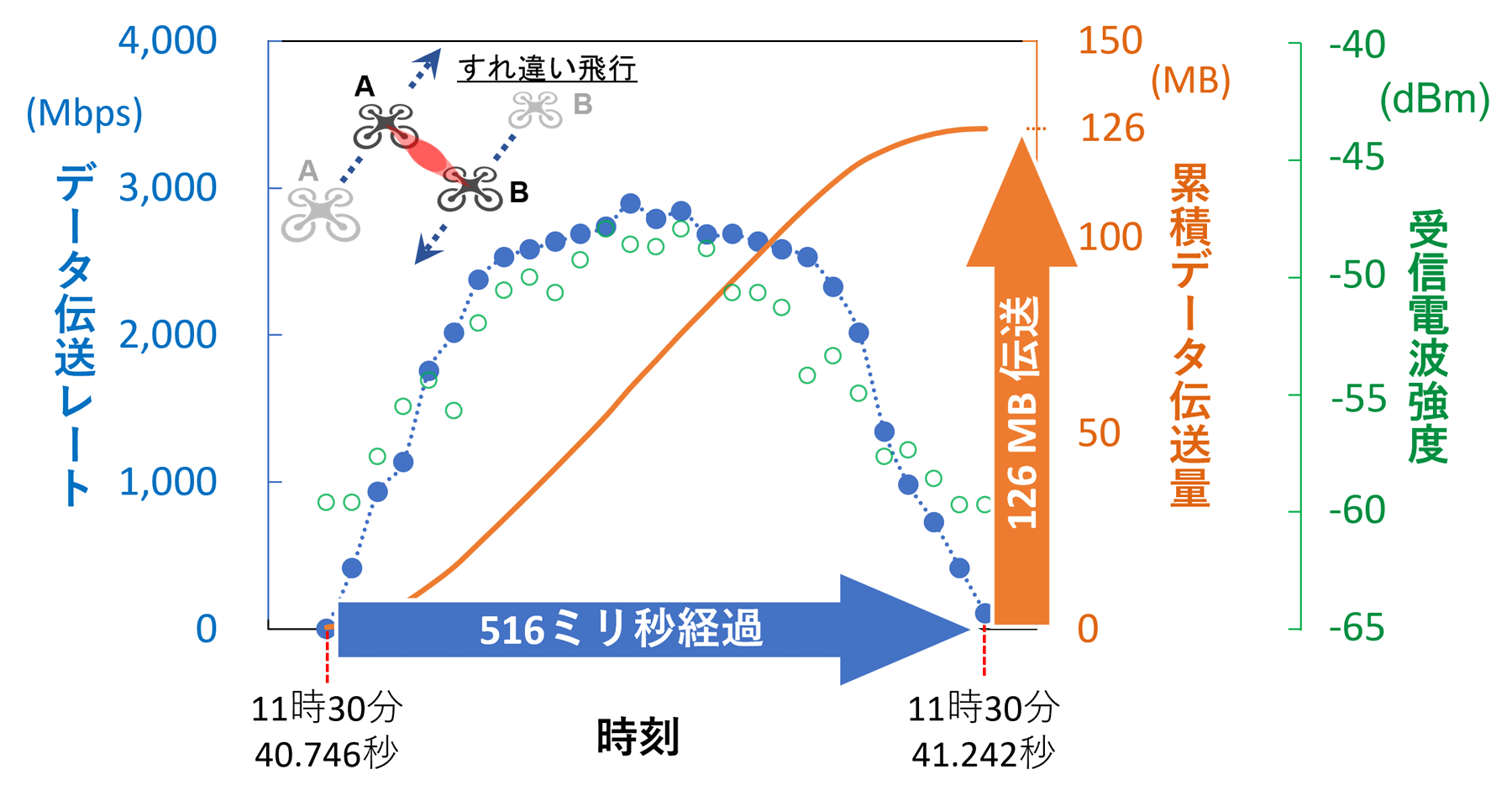
図2 ドローンすれ違いで形成される通信スポット内での
伝送レートと累積データ伝送量
[画像クリックで拡大表示]
伝送レートと累積データ伝送量
[画像クリックで拡大表示]
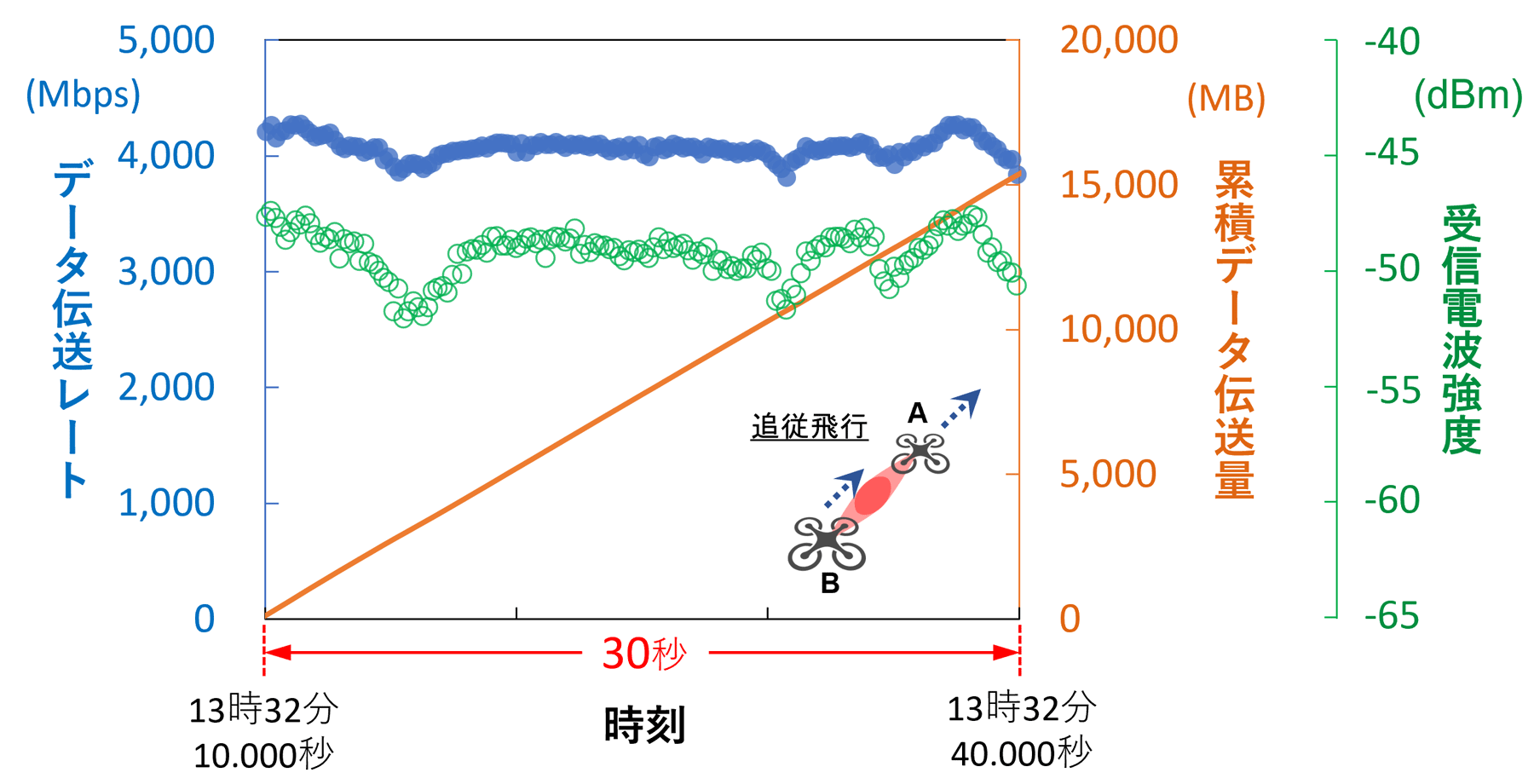
図3 追従飛行時の伝送レートと累積データ伝送量
[画像クリックで拡大表示]
[画像クリックで拡大表示]
今回NICTは、ソニーセミコンダクタソリューションズ株式会社と共同で、60 GHz帯無線デバイス(国際無線通信規格IEEE802.15.3 e に準拠し、2ミリ秒以下でリンク確立が可能)を搭載したドローン間通信システムを開発し、その2機のドローンを飛翔中に接近させ(図1参照)、僅か0.5秒程度(516ミリ秒)の通信可能時間内で120 MBを超えるデータを伝送することに成功しました(図2参照)。
リンク確立までに数秒を要する一般的な通信規格では難しい飛翔中の、ごく短時間で生じる超高周波帯通信スポットの利用率が向上し、実験では、通信可能時間のうち、99 %に及ぶ区間を実際のデータ伝送に利用できることを確認しました。
また、ドローン2機が一定距離を保って飛行するようにルート設定し、追従飛行させることで、ドローンが作る60 GHz帯通信スポットを追尾し、通信リンクを維持することによって、通信可能時間を延長することができました。一例では、ドローンの追従飛行を行った30秒間で、10 GBを超える大容量データを伝送できることを確認できました(図3参照)。ドローンが滞空飛行することが難しい場面や、そもそも滞空飛行ができない航空機種を用いる場面では、“すれ違い通信”による、航空機の機動力を損なわないデータ伝送が有効であると考えられます。一方で、より大容量なデータを伝送する必要がある場面では、追従飛行などによってリンク維持時間を延長することも可能で、これらを状況によって使い分けることが有効であることが分かりました。
デモンストレーション動画公開中!(ソーシャルICTシステム研究室)
今後の展望
今回の成果によって、超高周波デバイスを搭載した行き先の違うドローン同士が、適切な飛行ルートを計画・実行することで、データの交換・共有を行う上空ネットワークの構築が期待できます。また、滞空飛行ができない航空機種であっても、すれ違いざまに超高周波通信を利用することができ、飛び交う航空機が状況に応じて連携し合う大容量データ伝送技術への展開に期待できます。
なお、本成果について、5月25日(木)に東京ビッグサイトで開催される電子情報通信学会 高信頼制御通信研究会にて講演する予定です。
講演情報
会議名: 電子情報通信学会 高信頼制御通信研究会
題目: [依頼講演]ドローン間における60GHz帯無線通信と通信タイミング制御のための時空間同期技術の利用
発表者: 磯谷亮介・近藤啓太郎・安田哲・志賀信泰・単麟・松田隆志・三浦龍・松村武・荘司洋三(NICT)
関連する過去のNICTの報道発表
- 2021年6月9日 「見廻りお願い!」 ミリ波IoT搭載サービスロボットによる協働型見廻りシステムを開発
https://www.nict.go.jp/press/2021/06/09-1.html
この研究成果の一部は、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の「ポスト5G情報通信システム基盤強化研究開発事業」(JPNP 20017)の委託事業の結果得られたものです。
補足資料
1. ドローンが作るデータ中継ネットワーク
NTNは、Beyond 5Gが目指す「超カバレッジ拡張」の実現に向けて重要な技術ですが、長時間安定して上空に待機できる航空機の実現などが課題として挙げられます。一方で、遅延耐性ネットワーク(DTN)として知られる、移動体が受信したデータを自らの移動力によって遠隔まで搬送し、さらに、他デバイスなどに転送する、ストア・キャリー・フォワード(SCF)方式に基づいたデータ搬送型中継ネットワークの構築も、上記カバレッジ拡張をより低コストに達成する有効な一手段として我々は位置付けています。DTNは、リアルタイム性を要する用途には不向きですが、大容量なバックアップデータや、長期視点の保守点検に用いられるセンサ・映像データなど、我々の生活を支えながらも遅延を許容する大容量データのオフロード先(負荷分散先)として期待できます。
DTNと超高周波帯通信の組合せによって、超高周波帯特有の限定的な通信スポットを自らの移動力で補い、実質的に通信スポットの延伸・拡張が可能となります。例えば、ビルや商業施設内などの屋内ならば自律移動可能なロボットが、屋外であれば自動運転車両やドローンなどが、そのデータ搬送型中継ネットワークを構成する要素となり得ます。
2. 超高周波帯の効能と課題
超高周波帯を用いたドローンなどの移動体通信システムでは、形成される通信スポットも移動するため、特定の時間と特定の空間においてのみ利用可能な、時空間的に限定された超スポット的な性質を示します(図1に本実証でドローンが形成した超スポットを模式的に示す。)。この効果は、周波数が高いほど顕著になり、超高周波帯が作る貴重な超高速通信スポットをいかに効率よく利用するかが鍵となってきます。
一般的な無線通信規格では、データ伝送を開始するのに必要な情報(識別情報、通信条件、暗号鍵など)の交換を行う前工程である"アソシエーション"に数秒要します。例えば、60 GHz帯の無線LAN規格であるIEEE 802.11adでは、アソシエーションの完了に平均2.2秒必要となる事例が示されており(参考: https://www.sony-semicon.com/en/technology/iot-com/transfer-jet.html)、1秒を切るような僅かな時間でだけ成立する通信スポットを利用することは容易ではありません。
本実証では、リンク確立を通信規格上は2ミリ秒以下、実質は1ミリ秒以下で完了する特徴を持つIEEE 802.15.3e準拠の60 GHz帯無線装置を用いることで、三次元ビーム走査などを行わないシンプルな構成で、時空間的に限定された通信スポットを利活用する方法の実用性を検証しました。
3. 今回の実証システムの構成
図4に本実証実験で用いたドローンの外観を、図5にシステム構成を示します。今回、超高周波帯域のうち、Gbps以上の実効スループットを期待できると同時に、免許不要な周波数帯である60 GHz帯を採用し、リンク確立を通信規格上は2ミリ秒以下、実測1ミリ秒以下で完了するIEEE 802.15.3e準拠の無線デバイスを用いました。無線デバイスの通信ログには、時空間同期によってタイムスタンプを付与し、分析に利用しました(参考: NICT News 2022 No.4(通巻494)発行「時空標準技術: 分散化、そして時空間同期へ」 https://www.nict.go.jp/data/nict-news/NICT_NEWS_2022-494_J.pdf)。また、NICTが開発したドローンマッパー®も搭載し、ドローンの位置情報などを地上で監視しながら実験を推進しました(参考: https://www.nict.go.jp/press/2019/01/24-1.html)。

図4 本実証で使用したドローンの外観
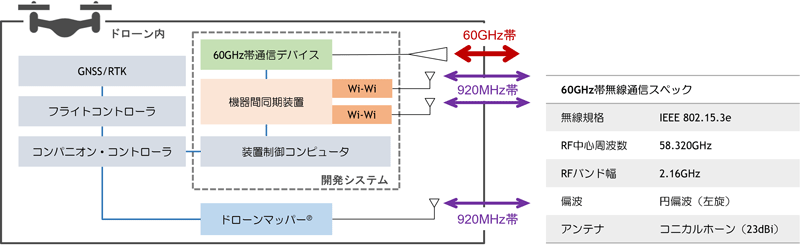
図5 実証システムの構成図及び主要な仕様
4. ドローンの飛行形態と超高周波帯通信の関係
本実証では、滞空飛行、すれ違い飛行、追従飛行の3種の飛行形態において60 GHz帯データ伝送を実施しました(図6参照)。いずれも2機のドローンを利用しており、滞空飛行は両機(A, B)が共に滞空、すれ違い飛行は両機(A, B)が異なる方向に航行しすれ違う状況を作り出し、追従飛行は先導機(A)を追うように追従機(B)が一定距離を保って航行する飛行形態を示します。
すれ違い飛行は、飛翔する行き先の異なるドローン同士が、そのすれ違いざまに超高周波を用いたデータ伝送を行うことを想定しています。最接近点を中心とする特定の範囲内だけで通信可能な状況が作られますが、接近後に遠ざかる動きをするため、ごく短時間のみ通信が可能となります。一方で、追従飛行は、後続機Bが先導機Aに行き先を合わせなければならず、自由度が限定されますが、通信可能な位置関係を維持した状態で継続的に飛行できるため、より大容量の通信を行うことができます。
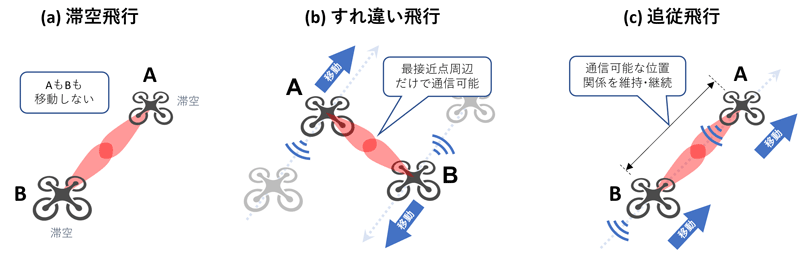
図6 本実証で実施したドローンの飛行形態
5. 超高周波帯通信の実証結果詳細
図7(a)に、2機のドローンが機体間距離10 mで滞空した場合の60 GHz帯データ伝送の様子を示します。およそ3 Gbpsの一定の伝送レートが維持できていますが、2.6 Gbpsから3.7 Gbpsの範囲で変動することが見て取れます。これは、風などの外乱による機体のふらつきによって生じる受信電波強度の変動によるものです。
滞空飛行のような一定の伝送レートを示す例と比較して、ドローンすれ違い時には、限定された通信可能時間の間でだけデータ伝送ができます。図2に示した例では、2機のドローンの相対速度は5 m/sで、すれ違った時のデータ伝送時間は516ミリ秒であり、この間に合計126 MBのデータを送信することができました。なお、最接近距離は7.2 mです(水平距離5 m及び高度差5 m)。搭載無線デバイスのリンク確立時間に基づくと、99 %以上の時間を有効にデータ伝送に利用できたことになります。区間全体の実効伝送レートは、上り/下り共に1.86 Gbpsで、最大の伝送レートはおよそ3 Gbpsでした。また、ドローンのすれ違い速度が遅い場合には、図7(b)のようにリンク維持時間が長くなり、データ伝送量が増加する傾向にあります。ドローンが飛行を中断して滞空したり、行き先の変更を伴う追従飛行を行わなくても、飛行速度の変化によってデータ量を調整できることを示しています。
また、片側のドローンを固定基地局のように滞空させたまま、別のドローンはその近辺を通り過ぎるだけで、データ伝送を行うこともできます。図7(c)及び図7(d)は、片側ドローンが滞空したときの様子を示しており、いずれも両機が移動するすれ違いと同様の傾向を示します。また、相対速度が同一であれば、両機が飛行するすれ違い(図7(b)参照) と片側滞空のすれ違い(図7(d)参照)のどちらもほぼ同等の伝送特性を示しており、今回実証した60 GHz帯のすれ違い通信は、片方のドローンが滞空していても有効であることが分かりました。
また、図3は1 m/sで飛行するドローンを後方から別のドローンが追従したときのデータ伝送特性を示します。行き先の変更を伴いますが、追従飛行をさせることで、その時間分だけリンク維持時間を延長させることができます。一例として、30秒の間追尾を行った結果を示しており、15 GBのデータ伝送ができることを確認しました(図2のすれ違い通信と比較すると約60倍のリンク維持時間の延長)。この例では、伝送レートがばらついているが(標準偏差にして234 Mbps、±4 %の変動に相当)、長期的に見た累計データ量は直線的に増加しています。
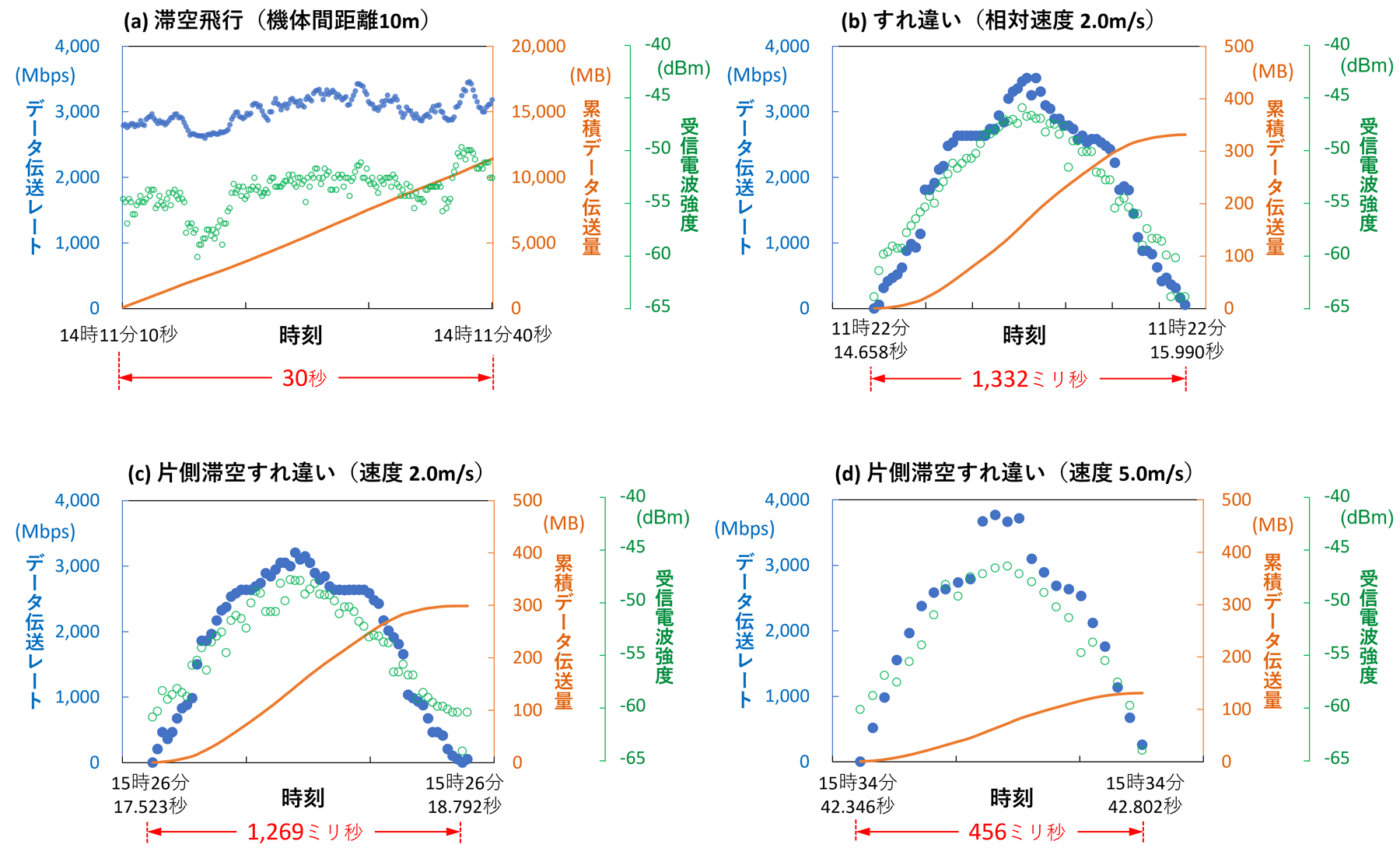
図7 様々な飛行条件における60 GHz帯データ伝送特性
[画像クリックで拡大表示]
[画像クリックで拡大表示]
用語解説
60 GHz帯無線
ミリ波帯に属する無線周波数帯で、日本国内では59 GHz~66 GHz帯が免許不要帯域として利用可能である。
追従飛行
あるドローン(先導機)が飛行するときに、その後方を一定の距離を保って別のドローン(追従機)が追従する飛行形態のこと。ドローンは、自己位置推定と姿勢制御のためにGPS測位やリアルタイムキネマティック(RTK)測位を標準搭載していることが一般的で、条件によっては、10センチメートル程度の正確さで上空に設定されたルートを指定速度で自律航行することも可能である。追従機に対して、先導機を追従させるようなルート飛行の指令を与えることで、ドローン自身の自律航行機能によって追従飛行が実現できる。
超カバレッジ拡張
人の生活圏である地上のみならず、これまでの移動通信システムではカバーできなかった空・海・宇宙空間にわたるあらゆる場所で無線通信を利用可能とする概念で、ドローン・ロボット・自律船舶だけが活動できるような極限エリアもカバーし、人の生活を支えるそれらの自律移動体に通信を提供する目標概念である。
非地上系ネットワーク(NTN: Non-Terrestrial Network)
地上以外の場所で形成した無線ネットワークのことで、代表的なものとして衛星通信が知られている。地球上のどこにいても無線通信が利用できることを目指しており、大規模災害時などにも有効な通信手段としても期待され、Beyond 5Gの超カバレッジ拡張を実現する手法の一つである。
超高周波帯
30 GHz~300 GHzの周波数帯域を利用するミリ波帯と、さらに、3 THzまでの周波数を用いるテラヘルツ帯を含む。従来周波数帯と比べて極めて広い帯域を利用できるため、高速・大容量通信が可能で、次世代通信技術において有望な周波数帯と目されている。一方で、電波の届く距離は短く、直進性が強いため、通信可能となるエリアが極めて狭い通信ゾーン(超スポット)となることが特徴である。
遅延耐性ネットワーク(DTN: Delay Tolerant Network / Disruption-Tolerant Network)
継続的・安定的なネットワーク接続が不可能な極限環境や移動環境におけるネットワーク手法。リアルタイム性を要する用途には不向きだが、ドローンの機動力を活かし、受信したデータを遠隔まで搬送し、さらに、他デバイスなどに転送するデータ搬送型中継ネットワークの構築への応用が期待できる。
IEEE 802.15.3e
免許不要な60 GHz帯のミリ波を利用する近距離高速無線通信の国際標準規格。リンク確立に要する時間は2ミリ秒以下、通信速度はチャネル当たり最大13.1 Gbpsという特徴がある(チャネルの帯域幅は2 GHz)。本実証では、本規格に準拠したTransferJet Xを採用した。
TransferJet及びTransferJet ロゴは、一般社団法人TransferJetコンソーシアムがライセンスしている商標である。
TransferJet及びTransferJet ロゴは、一般社団法人TransferJetコンソーシアムがライセンスしている商標である。
リンク確立
データ伝送に必要な信号の情報交換(アソシエーション)が行われ、データ伝送路が確立されること。通信開始前に必要なプロセスであり、通信品質を保証するために重要な役割を持つ。
本件に関する問合せ先
ソーシャルイノベーションユニット
総合テストベッド研究開発推進センター
ソーシャルICTシステム研究室
磯谷 亮介、荘司 洋三
E-mail: social-info ml.nict.go.jp
ml.nict.go.jp
ml.nict.go.jp広報(取材受付)
広報部 報道室
E-mail: publicitynict.go.jp
nict.go.jp