JAMSTECとNICTの共同研究チームは、テレオペレーションに必要となる「きずな」が提供する超高速の衛星通信リンクを船上に確立するために、アンテナの高精度な初期捕捉及び衛星トラッキング(追尾)システムを開発する一方で、負荷分散や自己復旧能力を持つ新開発のネットワーク技術にて構成された「おとひめ」制御システムを開発しました。これまで、陸上において通信試験、結合試験を実施するとともに、各機能とシステム構成について検討を重ね、このたび、実機を用いた海域試験において、世界で初めて高速衛星通信による無人探査機テレオペレーションに成功しました。
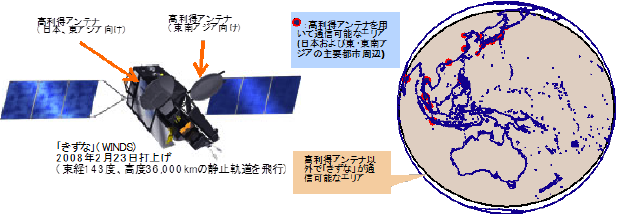
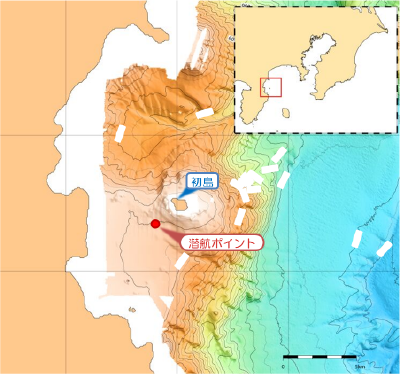
本試験は、本年10月6日に「きずな」の高利得アンテナ(アンテナの受信能力が高いので、送信電力が極めて小さい地上局からの信号も受信できる)を利用して、JAMSETC横須賀本部(神奈川県横須賀市)と相模湾初島沖を航行するJAMSTEC所有の海洋調査船「かいよう」とを相互通信することにより、海中を潜航中の「おとひめ」のテレオペレーションを実施したものです。
JAMSTEC横須賀本部には「きずな」との通信を行う大型車載地球局と「おとひめ」の陸上制御コンソール(コンピュータを操作するために使う入出力装置のセット)を設置しました。一方、「かいよう」船上には衛星トラッキングシステムを備える船舶搭載局と「おとひめ」の船上制御コンソールを設置しました。「おとひめ」は「かいよう」と直径1mmの光ファイバケーブルで連結されており、光通信にて船上制御コンソールに「おとひめ」に関する全ての情報が送信されます。船上制御コンソールでは、受信した情報を船上の船舶搭載局に配信し、「きずな」を経由してJAMSTEC横須賀本部に送信され、大型車載地球局がこれを受信することで、陸上制御コンソールにおいて当該情報が展開されます。陸上制御コンソールでは、オペレータがこれをモニタリングしながら、同経路にて「おとひめ」への制御指令を発信することで「おとひめ」のテレオペレーションを実現しました(
図1)。
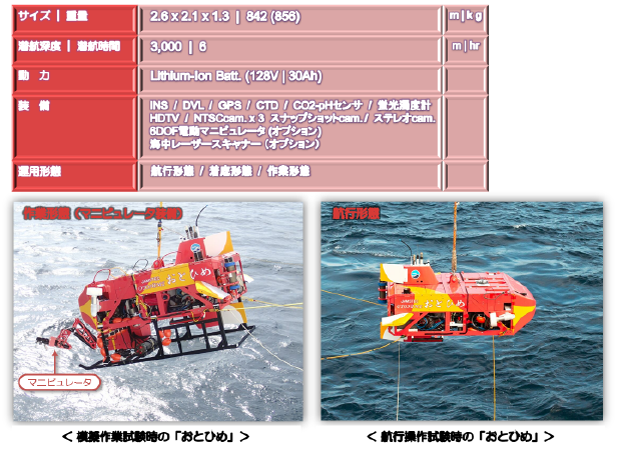
内容としては、簡易コントローラーを用いた多関節マニピュレータによる模擬作業試験と、専用のアクチュエータ操縦卓を用いた「おとひめ」の航行操作試験を実施しました。いずれの試験においても陸上のオペレータは、ほぼリアルタイムに「おとひめ」が撮影した海底のハイビジョン映像やその他3種類のTVカメラ映像、「おとひめ」のステータスデータ(探査機の状況を表すデータ)等(表1)をモニタリングしながら操作しました。また本試験では、陸上制御コンソールと船上制御コンソールとがTV会義システムで中継されており、オペレータと現場との音声によるコミュニケーションだけでなく、現場の状況を視覚的に伝えることもできました。